Contrar a ceea ce credem în mod obișnuit, o servocomandă nu este un singur element, ci un set de dispozitive care alcătuiesc un sistem de control al mișcării. O servocomandă include:
- PLC - responsabil pentru trimiterea semnalelor de control,
- Servo-controler - responsabil pentru comunicarea directă cu unitatea și cu sursa de alimentare a acesteia,
- Servomotor - element executiv, care transformă semnalele primite în mișcarea corespunzătoare,
- Comunicare PLC - servocomandă.

Fig. 1
O servocomandă este un sistem care este utilizat în principal pentru a controla poziția și viteza, dar și cuplul. În acest caz, PLC este controlerul principal, care impune controlul corespunzător al servomotorului. Dispozitivul intermediar între schimbul de informații între PLC ↔ servomotor este servocomandorul, care calculează parametrii de alimentare a servomotorului (frecvență, fază, polaritate, valoarea curentului) pe baza semnalelor de comandă. Astfel se asigură că profilul de mișcare corespunde celui programat.
Comunicarea cu PLC are loc prin ModBus, CANopen sau prin protocolul EtherCAT, mult mai rapid. Din cauza mediului de operare industrial al servomotoarelor, cartografierea acționării este supusă multor erori datorate unor factori externi. Pentru a le reduce, servocomandăa funcționează cu feedback.
PLC
Funcția unității de control este realizată de un PLC. Cu controlerele Unitronics, programarea mișcării a fost mult îmbunătățită. Diferența față de alți producători constă în principal în simplitatea programării. Unitronics a pregătit o serie de blocuri funcționale care necesită doar atribuirea parametrilor relevanți, astfel încât să poată fi pornită o mișcare cu profilul dorit. Configurarea axelor de acționare, precum și programarea comenzii se realizează într-un singur mediu UniLogic, iar comunicarea cu servocontrolerul se poate face utilizând ModBus, CANopen și protocolul rapid specific industriei EtherCAT. Controlul servocomenzii poate fi efectuat pe HMI-urile de bord din PLC (sau HMI virtual) sau de la distanță, utilizând software-ul UniLogic.
Servomotor
Cele mai frecvente servomotoare utilizate în industrie sunt cele bazate pe un motor fără perii. O componentă este un rotor învelit în magneți permanenți puternici, iar cealaltă componentă, statorul, constă dintr-un număr de bobine care pun în mișcare rotorul prin alimentarea bobinelor în ordinea corectă. Mișcarea rotorului depinde de frecvența, faza, polaritatea și valoarea curentului furnizat la momentul potrivit înfășurărilor statorului.
În general, servomotoarele sunt o alternativă la motoarele pas cu pas în cazul în care este importantă mișcarea multi-axă de înaltă calitate. Diferența provine din modul în care este controlată deplasarea. În cazul motoarelor pas cu pas, există un cuplaj în buclă deschisă, ceea ce face ca motorul să piardă deseori pași (în special sub sarcină mare) în timpul accelerațiilor rapide sau al vitezelor mari. Din acest motiv, motoarele pas cu pas se caracterizează prin prețul lor scăzut. Cu toate acestea, cerințele industriale ridicate înseamnă că acestea tind să fie utilizate pentru sisteme cu cerințe reduse în ceea ce privește precizia și repetabilitatea deplasării, iar servocomenzile, în ciuda costului lor mai ridicat, sunt ideale pentru această sarcină. Calitatea ridicată a controlului generează pierderi de producție reduse, iar calitatea construcției se traduce printr-o nevoie mai mică de întreținere, ceea ce face ca aceste sisteme să se amortizeze rapid.
Servoregulator
Servocontrolerul execută instrucțiunile primite de la controlerul principal (în cazul nostru, un PLC) și controlează parametrii servo, cum ar fi cuplul, viteza sau poziția. Parametrii menționați mai sus sunt supravegheați pe baza semnalelor de intrare care intră în servocomandor, o buclă de reacție închisă implementată de codificator și de motorul însuși. Pe această bază, servocontrolerul livrează motorului o cantitate adecvată de putere într-un interval de timp adecvat. Sarcina de bază a dispozitivului este similară cu cea a unui invertor, dar în acest caz are loc conversia curentului alternativ de rețea (curent alternativ cu o frecvență de 50 Hz) în curent alternativ cu o frecvență stabilită. În general, funcțiile servocomandorului pot fi împărțite în:
- Comunicarea cu PLC,
- Citirea feedback-ului de la codificator pentru implementarea buclei de feedback în timp real,
- Gestionarea semnalelor de intrare-ieșire către sistemele de siguranță.
Buclă de reacție închisă
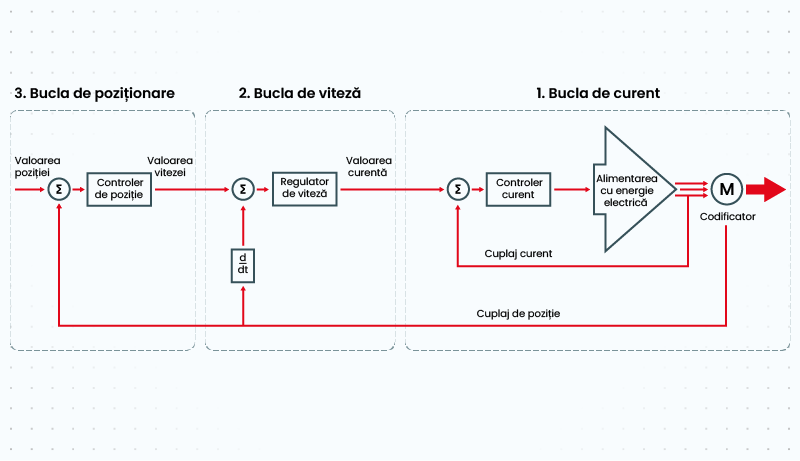
Fig. 2
Sistemul de control încorporat în servocomandor monitorizează motorul pe baza unei bucle de reacție închise. Poziția curentă a servomotorului, turația sau cuplul sunt semnale de reacție pentru a fi comparate cu semnalul de control și se calculează abaterea care apare. Acest lucru permite poziționarea precisă și corectarea profilului de mișcare rotațională sau liniară pentru a reduce abaterile cauzate, de exemplu, de inerția sistemelor mecanice sau a obiectelor din sistemul de mișcare. Feedback-ul este asigurat de un encoder, care detectează modificările în poziția unghiulară a arborelui și transmite informațiile către servocomandor. În timp real, servocontrolerul efectuează modificări ale parametrilor de funcționare, astfel încât sistemul să îndeplinească cerințele dorite.
Cuplajul controlează poziția, viteza și cuplul în mod independent. Aplicațiile industriale nu vor necesita întotdeauna utilizarea tuturor celor trei bucle de reacție. Unele sisteme vor aștepta doar monitorizarea cuplului, pentru care se utilizează doar bucla de curent. În altele, controlul vitezei necesită doar bucla de curent și viteza. În majoritatea aplicațiilor industriale, servocomenzile sunt utilizate pentru controlul precis al vitezei, unde trebuie utilizate toate cele trei bucle de reacție.
Codificator
Ceea ce face ca designul servomotorului să fie diferit de alte dispozitive de acționare este codorul. Acesta permite realizarea unei funcționări de mare viteză și de înaltă precizie prin generarea de semnale de reacție. În unele aplicații, se întâmplă ca acesta să fie un dispozitiv separat (nu este încorporat în servomotor). În acest caz, encoderul este utilizat ca o componentă suplimentară care permite citirea parametrilor externi importanți pentru sistem.
Putem împărți encoderele în două tipuri: incrementale (20 de biți) și absolute (23 de biți). Principala diferență constă în faptul că un encoder absolut măsoară poziția absolută a servomotorului, astfel încât, chiar și atunci când se întrerupe alimentarea cu energie electrică, poziția este memorată. Codificatoarele incrementale determină poziția relativă pe baza numărării impulsurilor în timpul mișcării. Rezoluția encoderului (20/23 biți) determină câte poziții diferite pot fi distinse. În cazul unui encoder absolut, aceasta reprezintă 8.388.608 poziții care pot fi distinse.
Sisteme de control
Sistemele de control suplimentare sunt încorporate în servocontroler pentru a reproduce mișcarea solicitată de utilizator cât mai exact posibil. Primul dintre acestea este autotuningul, care este responsabil pentru ajustarea în timp real a câștigului servomotorului, astfel încât să neutralizeze orice interferență rezultată, de exemplu, din momentele de inerție ale obiectelor care sunt deplasate. Un alt rol este jucat de sistemul de amortizare a vibrațiilor. Datorită utilizării servomotoarelor în diferite sisteme mecanice, numărul de conexiuni dintre servomotor și actuatorul final poate fi atât de mare încât rigiditatea întregului sistem este redusă. În astfel de situații, servocontrolerul, analizând vibrațiile care apar în sistem, este capabil să modifice parametrii de funcționare ai servomotorului astfel încât să nu afecteze caracteristicile de mișcare, ci să reducă semnificativ vibrațiile care apar.
În plus față de sistemele de control automat, utilizatorul are opțiunea de a face ajustări manuale, fie direct cu ajutorul controlerului, fie de la distanță cu ajutorul software-ului UniLogic. Instrumentele de diagnosticare permit monitorizarea în timp real a formei de undă a mișcării, iar manipularea câștigului și a rigidității va face posibilă neutralizarea oricăror perturbații sau depășiri ale axei de acționare care apar. Acestea ar putea afecta în mod negativ funcționarea motorului și s-ar putea traduce printr-o precizie redusă a poziționării.
Servocomenzile sunt instrumentul ideal de control al mișcării în mediile industriale solicitante, permițând un control precis al poziției, vitezei și cuplului. Unitronics a dezvoltat instrumente pentru a integra rapid și ușor servomotoarele în sistemele mecanice, astfel încât, folosind software-ul UniLogic, putem configura axele de acționare, diagnostica și regla funcționarea acestora pentru a satisface cerințele noastre și programa diferite profiluri de mișcare.
Rezumat
Din articol ați aflat ce este o servocomandă. Dacă doriți să știți despre:
- configurarea servomotoarelor,
- programarea acestora în mediul Unilogic,
- diagnosticare la distanță,
- moduri de funcționare,
- Comunicarea EtherCat în servomotoare,
scrieți-ne la: adrian.gemanaru@elmark.com.ro
De asemenea, vă încurajăm să aruncați o privire la gama noastră de servomotoare Unitronics.